Hysterectomy Class IV
Total Hysterectomy
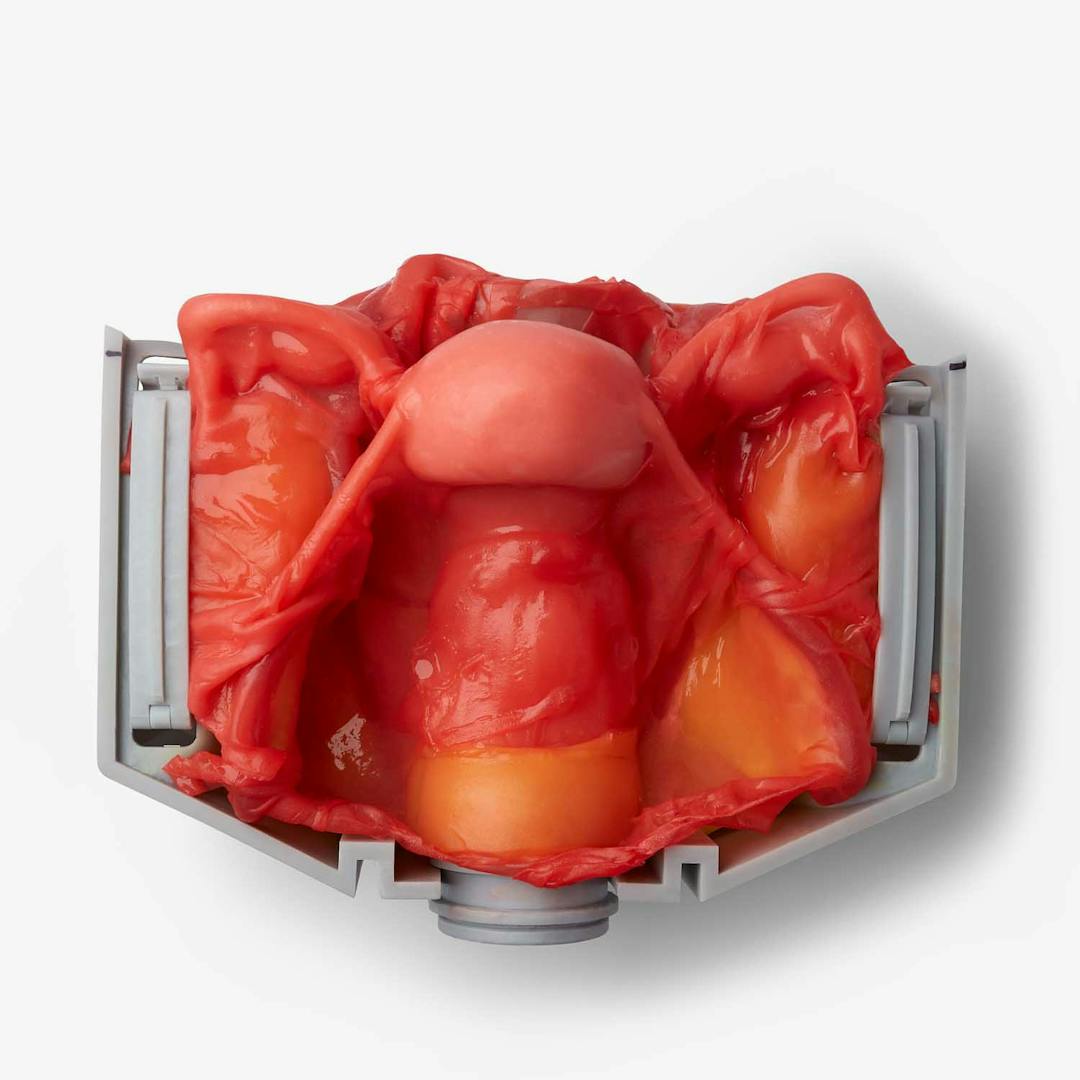
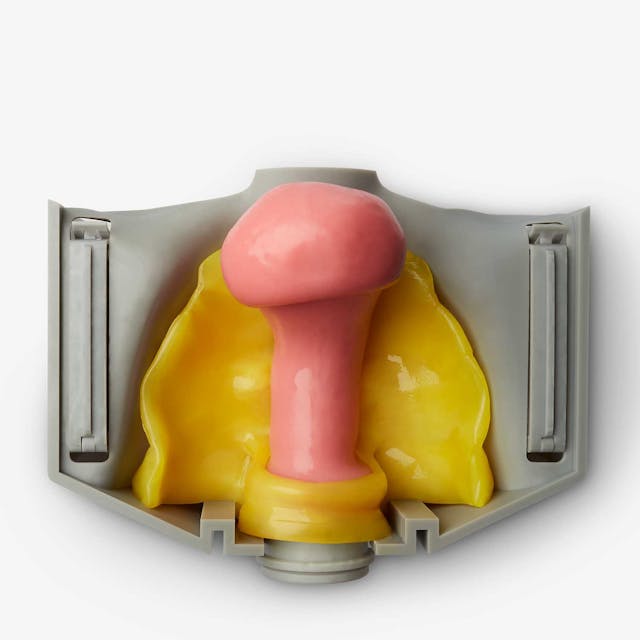
The Class IV Hysterectomy hydrogel model represents the female reproductive system, urinary system, key arteries and peritoneum. It provides task specific training of essential skills of a total hysterectomy, including: insertion and removal of uterine manipulator, dissection of the broad ligament, mobilisation of ovaries, skeletonising uterine artery, mobilising bladder flap, colpotomy with surgical energy, vaginal cuff closure with barbed or non-barbed sutures.
Note: The Pelvic Fat Base and Female Pelvis Stand are sold separately.

Specifications
Procedure
Total Hysterectomy
Category
General
Task Specific Training
Uterine manipulator insertion, opening round ligament, detatching the ovaries and associated ligaments from pelvic side wall, mobilising bladder, differentiating pelvic anatomy, colpotomy, vaginal cuff closure
Features
Package contains
Class
Class IV
Related Products

Female Pelvis Stand
Class I


Why Pindari
Cutting edge robotic technology is continually unlocking new approaches to advance surgery. In parallel, the training methods are also undergoing similarly significant advances. Utilising a suite of advanced simulation devices and anatomically correct synthetic organs, trainees can now develop high skill levels and train for a wide range of routine and demanding emergency situations all prior to commencing live surgery. This approach maximises patient safety, and ensures that surgeons receive the advanced training necessary to extract the very best outcomes from the latest robotic devices.
©IMRA 2025
Privacy Policy